Next: Example: Cube Rotating about Up: Dynamics of Rigid Bodies Previous: Example: The Inertia Tensor Contents
For any object (and origin), there is (at least one) a set of principal axes for which the inertia tensor is diagonal. It can be shown that he axes are orthogonal. Sometimes there is more than one set, particularly in cases of symmetry.
We can
find the principal axes, or the axes of rotation that do not require torque by solving an eigenvalue equation.
Basically we want to pick a direction for
![]() so that the angular momentum is parallel to
so that the angular momentum is parallel to
![]() .
.
 |
||
 |
||
 |
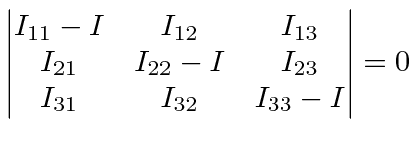
The principal axes are real and orthogonal.
For a sphere, which has the highest symmetry, the three eigenvalues will be equal. For a symmetric top, two will be equal. For an asymmetric top, they will probably all be different.