Next:
Angular Momentum
Up:
Dynamics of Rigid Bodies
Previous:
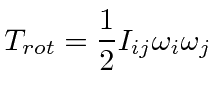
Calculating the Kinetic Energy
Contents
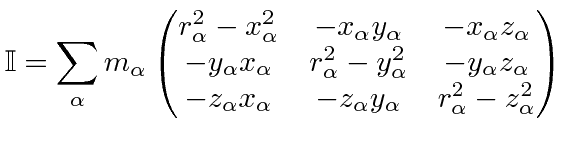
The Inertia Tensor
The above calculation of the kinetic energy defines the
inertia tensor
.
Note that
is a symmetric tensor (under interchange of the two indices). We can also write the inertia tensor in matrix form.
For a continuous mass distribution, we may use an integral rather than a sum over masses.
Subsections
Angular Momentum
Simple Example: Inertia Tensor for Dumbbell
Transforming the Inertia Tensor
Jim Branson 2012-10-21
![\bgroup\color{black}$ \displaystyle I_{ij} \equiv \sum\limits_\alpha m_\alpha\left[\delta_{ij}r_\alpha^2-r_{\alpha i} r_{\alpha j}\right]$\egroup](img346.png)
![\bgroup\color{black}$\displaystyle I_{ij}=\int\limits_V\rho(\vec{r})\left[\delta_{ij}r^2-r_ir_j\right] dV $\egroup](img348.png)