Next: Vector Identities Up: Classical Mechanics 110B Previous: Contents Contents
The laws of Physics are ``invariant'' under rotations of the coordinate system.
Rotational symmetry of laws of Physics implies conservation of Angular Momentum.
We will work with ``Passive Rotations'' where we rotate the coordinate axes rather than ``active rotations'' where we rotate the physical system and keep the axes fixed. These are essentially the same thing except the rotation angle changes sign.
A vector is a mathematical object that transforms in a particular way under rotations.
We know there are also physical quantities called scalars that are invariant under rotations.

Assume (for now) that we live in three dimensions. The position in three-space is an important example of a vector.

The
![]() are three
orthogonal unit vectors.
are three
orthogonal unit vectors.
 |
 for
for
 and zero otherwise.
and zero otherwise.
The dot product of two vectors is a scalar, and therefore invariant under rotations of the coordinate system.

We will often use the Einstein summation convention: repeated indices imply a sum over that index.
 |
We will also use the
totally antisymmetric tensor
 .
It changes sign if any of the three indices are interchanged.
Its value is one for any cyclic permutation of the indices and minus one for an anticyclic permutation.
It must be zero if any index is repeated since it is antisymmetric.
.
It changes sign if any of the three indices are interchanged.
Its value is one for any cyclic permutation of the indices and minus one for an anticyclic permutation.
It must be zero if any index is repeated since it is antisymmetric.
 |
||
 |
||
 |
||
 |
||
 |
We use this antisymmetric tensor to write a cross product between two vectors.
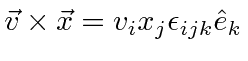
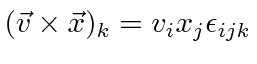 |
