Next: Checking Michelson Morley with Up: Special Relativity Previous: The Michelson Morley Experiment: Contents
Einstein postulated that the
speed of light is the same in any inertial frame of reference.
It is not possible to meet this condition if the transformation from one inertial reference frame to another
is done with a universal time, that is,
![]() .
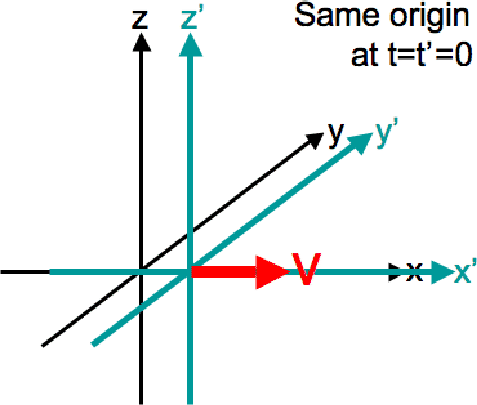
Let us study
a transformation from one inertial reference frame to another that is moving with
a constant velocity
.
Let us study
a transformation from one inertial reference frame to another that is moving with
a constant velocity
![]() in the
in the
![]() direction.
Such a transformation is usually referred to as
a boost.
direction.
Such a transformation is usually referred to as
a boost.
Newton's motion with constant velocity
![]() transforming to
transforming to
![]() requires that the
transformation be linear,
like a rotation.
We therefore
try a linear transformation in which both the position and the time transform.
Since this linear transformation will mix
requires that the
transformation be linear,
like a rotation.
We therefore
try a linear transformation in which both the position and the time transform.
Since this linear transformation will mix
![]() and
and
![]() , it is reasonable to try to
transform quantities that have the same units
2,
so we will try a dimensionless transformation of
, it is reasonable to try to
transform quantities that have the same units
2,
so we will try a dimensionless transformation of
![]() and
and
![]() .
.
We will
work in just two dimensions,
![]() and
and
![]() , like a rotation in the
, like a rotation in the
![]() plane.
(For the boost along the
plane.
(For the boost along the
![]() direction,
direction,
![]() and
and
![]() are not changed.)
are not changed.)
 |
|
 |
|
the given transformation | ||
 |
definition of the boost | ||
 |
 |
||
|
The
inverse of the transformation must be the same as a transformation with
![]() as the velocity of moving frame.
as the velocity of moving frame.
![]() and
and
![]() are scale factors that depend on the velocity of the transformation.
Since there is no difference between the
are scale factors that depend on the velocity of the transformation.
Since there is no difference between the
 and
and
 directions in physics,
we must use the
same
directions in physics,
we must use the
same
![]() and
and
![]() in the inverse transformation which has the same magnitude of velocity.
in the inverse transformation which has the same magnitude of velocity.
|
the transformation | ||
|
|||
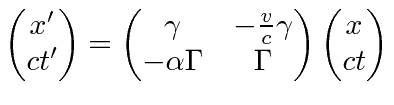 |
transformation as matrix eq. | ||
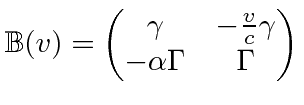 |
transformation matrix as function of |
||
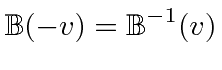 |
inverse is  |
||
 |
except |
||
 |
rhs is just inverse of 2X2 | ||
 |
upper left | ||
 |
lower right | ||
 |
|||
 |
|||
 |
must be  |
||
 |
plug
 |
||
 |
upper left | ||
 |
lower left | ||
 |
|||
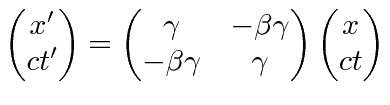 |
the transformation now |
Now,
consider a pulse of light moving in the
![]() direction emitted at
direction emitted at
![]() and
and
![]() in one inertial frame.
Since the origins of the two systems coincide at
in one inertial frame.
Since the origins of the two systems coincide at
![]() , this light is emitted in the primed frame with
, this light is emitted in the primed frame with
![]() , and
, and
![]() .
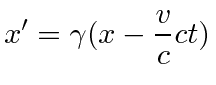
At a later time, the position of the light pulse will be at
.
At a later time, the position of the light pulse will be at
![]() .
By Einstein's postulate that the speed of light is independent of inertial frame,
(and by the Michelson-Morley measurement).
The pulse of light should be at
.
By Einstein's postulate that the speed of light is independent of inertial frame,
(and by the Michelson-Morley measurement).
The pulse of light should be at
![]() in the primed frame.
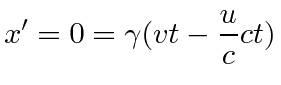
Our transformation must give this result, so lets try it.
Transforming the later position of the light pulse, we get.
in the primed frame.
Our transformation must give this result, so lets try it.
Transforming the later position of the light pulse, we get.
|
|||
 |
|||
 |
plug in |
||
 |
plug in |
||
 |
from the 2 eq. |
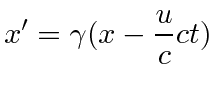
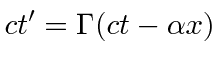
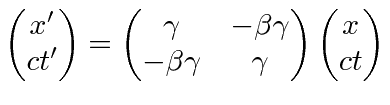
We have shown that the
most general transformation to a frame moving with a velocity
![]() ,
that is
consistent with Newton's laws and the isotropy of space,
and that satisfies the condition that the
inverse of the transformation is a transformation with velocity
,
that is
consistent with Newton's laws and the isotropy of space,
and that satisfies the condition that the
inverse of the transformation is a transformation with velocity
![]() ,
is given by:
,
is given by:
|

|
|

|
|
|
It took surprisingly little physics input to derive the Lorentz transformation for the space-time coordinates.