Next: Calculating the Effective Force Up: Noninertial Frames of Reference Previous: Noninertial Frames of Reference Contents
The arithmetic for rotating coordinate systems can be rather complicated, however, most of the physics can be understood in a relatively simple case. We will first study the simple case, then extend the equations a bit to include the general case.
Since any rotation is just a rotation in a plane, the simple case includes the most general rotation. Our simplification is that we will put two of the coordinate axes in the plane of the rotation. Since we have the choice of coordinate systems in solving our physics problems this covers many cases. But sometimes, like motion on the surface of the earth, we want to define our coordinates in another way and we will deal with that in the next section. In all cases, we will set up our coordinates so that the origin of the inertial coordinate system and the rotating coordinate system coincide.
Imagine we do experiments on a rotating table (rotation in the plane of the table). It is rotating about some point and we will call the point the origin of our coordinate systems.
We know about the ``effective''
centrifugal force
 from Freshman Physics.
If the table is rotating with
constant angular frequency
from Freshman Physics.
If the table is rotating with
constant angular frequency
![]() , we have
, we have
![]() .
.
There is another ``effective'' force that depends on velocity called the
Coriolis Force.
Lets understand this simply by assuming our rotating table is a
frictionless air table.
For our
first experiment we will send a puck straight across the table through the origin.
The puck goes from radius
 to radius
to radius
![]() and back to radius
and back to radius
![]() in our experiment
and we give the puck exactly the right velocity so that it makes this trip while the table undergoes exactly one half turn.
in our experiment
and we give the puck exactly the right velocity so that it makes this trip while the table undergoes exactly one half turn.
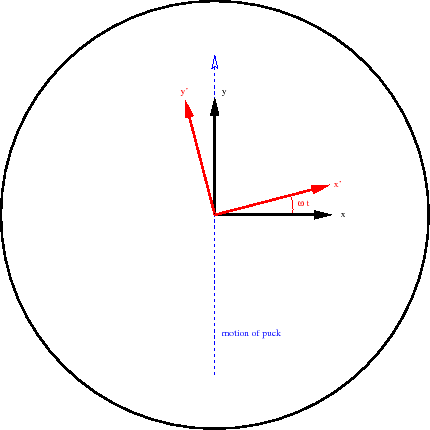
Now lets see what happens using the rotating coordinate system. The figure below gives a rough drawing of the puck's path in the rotating coordinate system. It does not move in a straight line.
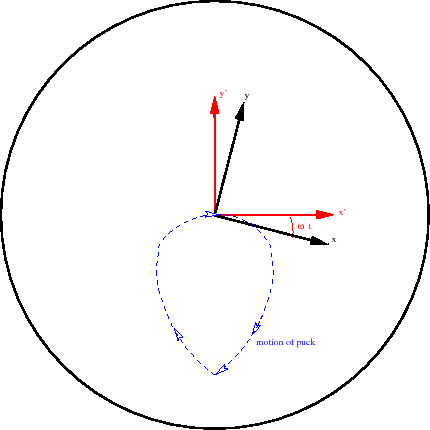
In the rotating frame, there was clearly some effective force that was not radially outward. That was the Coriolis force.