Next: Imaginary Angles Up: Special Relativity Previous: Hyperbolic Function Identities Contents
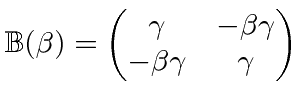
Clearly the symmetry transformation in the
![]() (
a boost) is not identical to
that in the
(
a boost) is not identical to
that in the
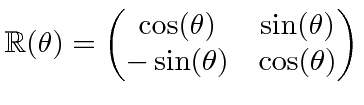
![]() plane (
a rotation)
plane (
a rotation)
 |
||
 |
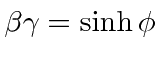
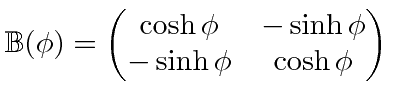
Lets try to put in the hyperbolic functions by
setting
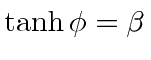 as the off diagonal terms in the matrix would indicate.
as the off diagonal terms in the matrix would indicate.

|
|
|
|
 |
 |
 |
|
 |
||
 |
||
 |
This gives us our simplest calculation of the velocity addition formula.
 |
 is not a 4-vector.
is not a 4-vector.